《机械管理开发》
深圳大学:可回收/焊接/机械耐用/可编程液态金属
来源:机械管理开发 【在线投稿】 栏目:综合新闻 时间:2021-05-08【科研摘要】
基于液态金属(LM)的弹性体在从软机器人技术到柔性电子学的广泛应用中受到越来越多的关注。然而,特别是具有多功能的基于LM的弹性体的制造,其具有可回收性和瞬时性,同时提供优异的机械性能和稳定性,仍然是一个挑战
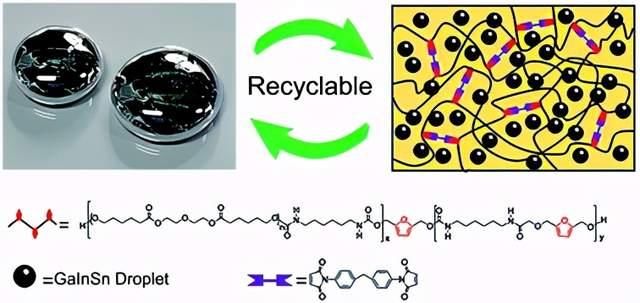
最近,深圳大学周学昌教授团队报告了一种制造耐用且可回收的多功能LM弹性体复合材料的策略,该复合材料由作为功能性填料的LM液滴和作为聚合物基质的Diels–Alder(DA)键交联聚氨酯(PU)网络组成。该复合材料显示出良好的机械性能,并且可以通过所谓的“机械训练”过程在空间上从电绝缘体调整到导体。受机械力作用的复合材料即使在100%拉伸应变下的10 000次拉伸-释放循环后仍表现出异常稳定的电性能。DA键交联的网络赋予复合材料良好的自我修复性能,3D形状的(重新)编程的高度自由度和良好的瞬态性。此外,空间热和光热加热能够修复/焊接断路或对复杂形状进行编程。
此外,在高温下溶解可迅速破坏复合材料,而有价值的LM则可以89%的收率回收。多功能,良好的机械和电气性能,尤其是瞬态特性,使这种复合材料成为用于柔性瞬态电子器件,执行器和可穿戴设备的环保材料。相关论文以题为Recyclable, weldable, mechanically durable, and programmable liquid metal-elastomer composites发表在《Journal of Materials Chemistry A》上。
【主图导读】
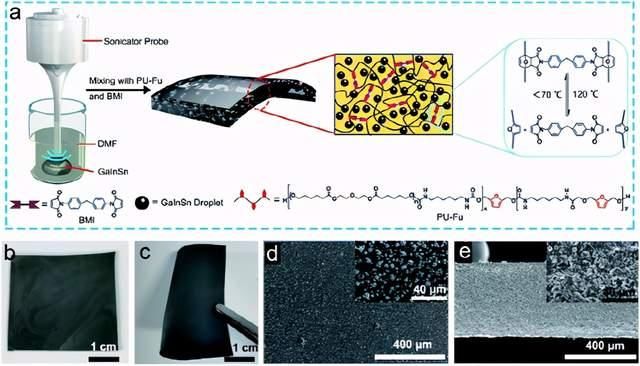
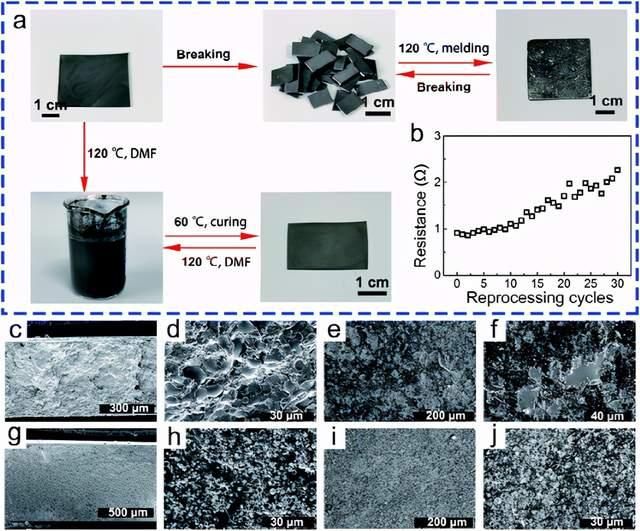
图1.可回收和可编程的LM-弹性体复合材料的制造。(a)复合材料制造过程的示意图,弹性体结构的示意图以及DA键的动态特性。(b和c)松弛(b)和折叠(c)时制成的LM-弹性体复合材料的光学照片,显示出良好的柔韧性。(d和e)一种代表性复合材料(50 vol%LM)的表面(d)和横截面(e)的SEM显微照片。
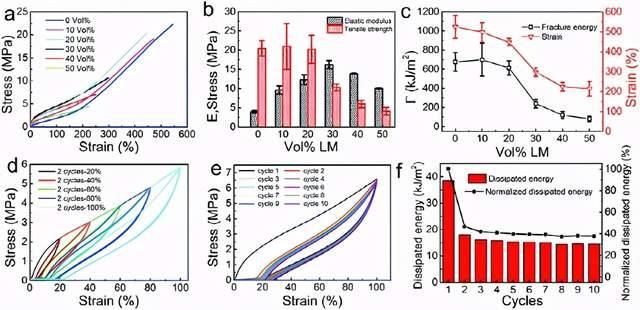
图2(a)复合材料的代表应力与应变曲线随LM体积百分比的变化而变化。(b和c)抗拉强度和弹性模量(b)和断裂能(c)作为LM vol%的函数。误差棒表示至少3次测量的标准偏差。(d)LM弹性体(30 vol%LM)在不同应变下的连续滞后加载-卸载曲线。(e)复合材料的循环装卸曲线(LM的30 vol%,10个循环)。(f)对应于(e)的每个循环的耗散能量和归一化耗散能量。
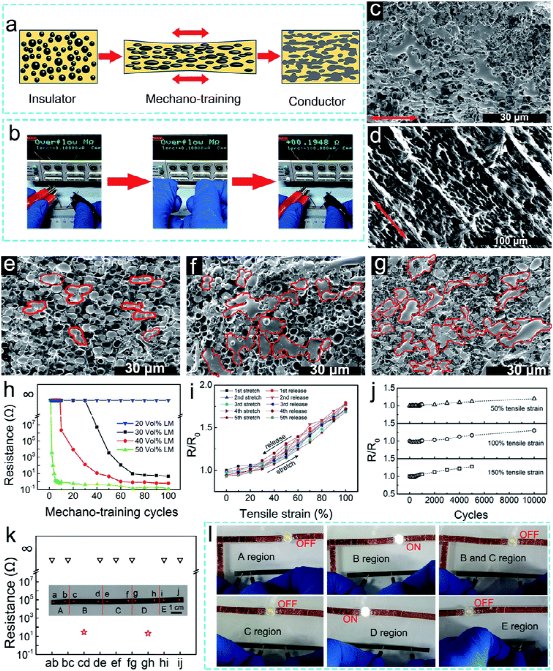
图3(a)机械训练过程的示意图。(b)数字图像显示了通过机械训练过程将LM-弹性体复合材料(50 vol%LM)的LM贴片从绝缘体转变为导体的过程。(c和d)复合材料(50 vol%)的横截面(c)和表面(d)的SEM显微照片,施加了50%的应变,经过100次机械训练后,LM液滴破裂并融合沿着训练方向(红色箭头指示训练方向)。(e–g)在10(e),30(f)和50(g)的机械训练循环后,复合材料横截面(50 vol%)的SEM显微照片,显示了在机械作用期间LM液滴的变形培训过程。(h)LM对20 vol%,30 vol%,40 vol%和50 vol%的复合材料的抵抗力取决于其机械训练循环次数。(i)在从0到100%拉伸应变的前5个拉伸-释放循环中,机械训练的复合材料(30 vol%)的归一化电阻。(j)在不同的拉伸应变下,经过机械拉伸的复合材料(30 vol%)的疲劳试验,其中R0为0.90(50%应变),1.02(100%应变)和1.13Ω mm-1(150%应变)。(k)空间机械训练复合材料的不同区域(LM的30 vol%)的电导率。(l)数码照片,显示通过选择性地点亮LED来进行空间机械训练的导体的电气性能。
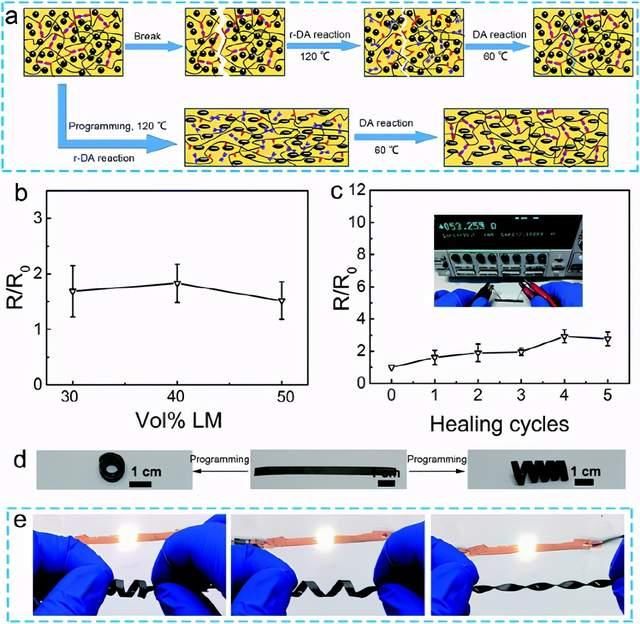
图4(a)是所制造的复合材料的自我修复和编程机制的示意图。(b)自愈的LM弹性体的归一化电阻对LM体积%。(c)归一化电阻对复合材料的自愈循环(LM的30 vol%)。(d)数码照片,证明可以将导电复合材料编程为不同的3D形状,线圈(左)和螺旋(右)。(e)数码照片显示了螺旋3D导电复合材料在机械应力下的性能。
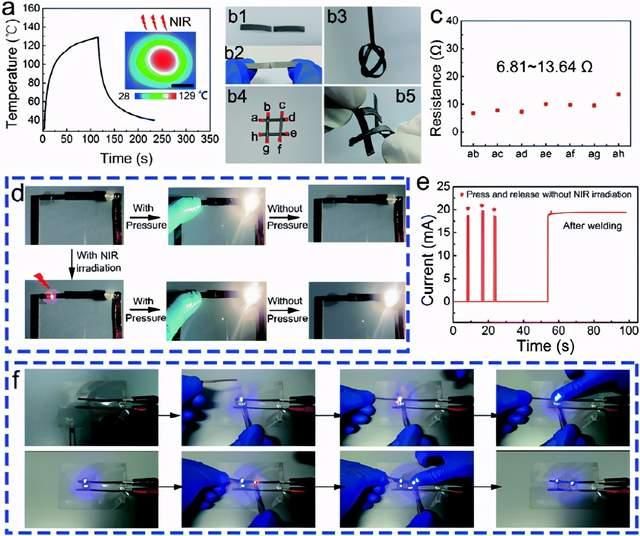
图5(a)在NIR激光(808 nm,2W)照射下,复合物(30 vol%)的光热效应。(b1-b5)在光热效应的帮助下,将制成的导电复合材料焊接成不同的形状。(c)焊接导体的八个顶点中的两个顶点的电导率(b4)。(d)通过局部光热焊接进行切换的LED灯泡。(e)打开LED灯期间电路(d)的I–t曲线。(f)数码照片显示了NIR感应将两个LED灯泡焊接到电路上的过程。