《机械管理开发》
东华大学:强机械、高灵敏多重传感、纳米纤维
来源:机械管理开发 【在线投稿】 栏目:综合新闻 时间:2021-05-20【科研摘要】
具有高导电性和机械坚固性的水凝胶在从医疗保健到软机器人的各种应用中均显示出巨大的潜力。然而,这种材料的创造仍然是巨大的挑战。最近,东华大学张世超研究员/丁彬教授团队提出了一种原位合成策略,用于开发具有强大机械和电子性能的生物启发化学合成二氧化硅-纳米纤维增强水凝胶(SFRH)。该策略是在分散良好的二氧化硅纳米纤维和乙烯基硅烷的存在下,由丙烯酰胺单体合成软水凝胶基质,从而产生具有创新界面化学键的均质SFRH。
所得SFRHs表现出优异的机械性能,包括在1400%断裂应变下的0.3 MPa的高机械强度,0.11 MPa的高杨氏模量(与人体皮肤相当)以及1000次拉伸循环的超弹性而无塑性变形,同时保持了高透光率( ≥83%)。同时,SFRHs表现出增强的离子电导率(3.93 S m-1),并可以高灵敏度(2.67的规格系数)和超耐用性(次循环)监测多种刺激(拉伸,压缩和弯曲)。这项工作可能会为各种用途的韧性和可拉伸水凝胶的设计和开发提供启发。相关论文以题为In Situ Synthesis of Mechanically Robust, Transparent Nanofiber-Reinforced Hydrogels for Highly Sensitive Multiple Sensing发表在《Advanced Functional Materials》上。
【主图导读】
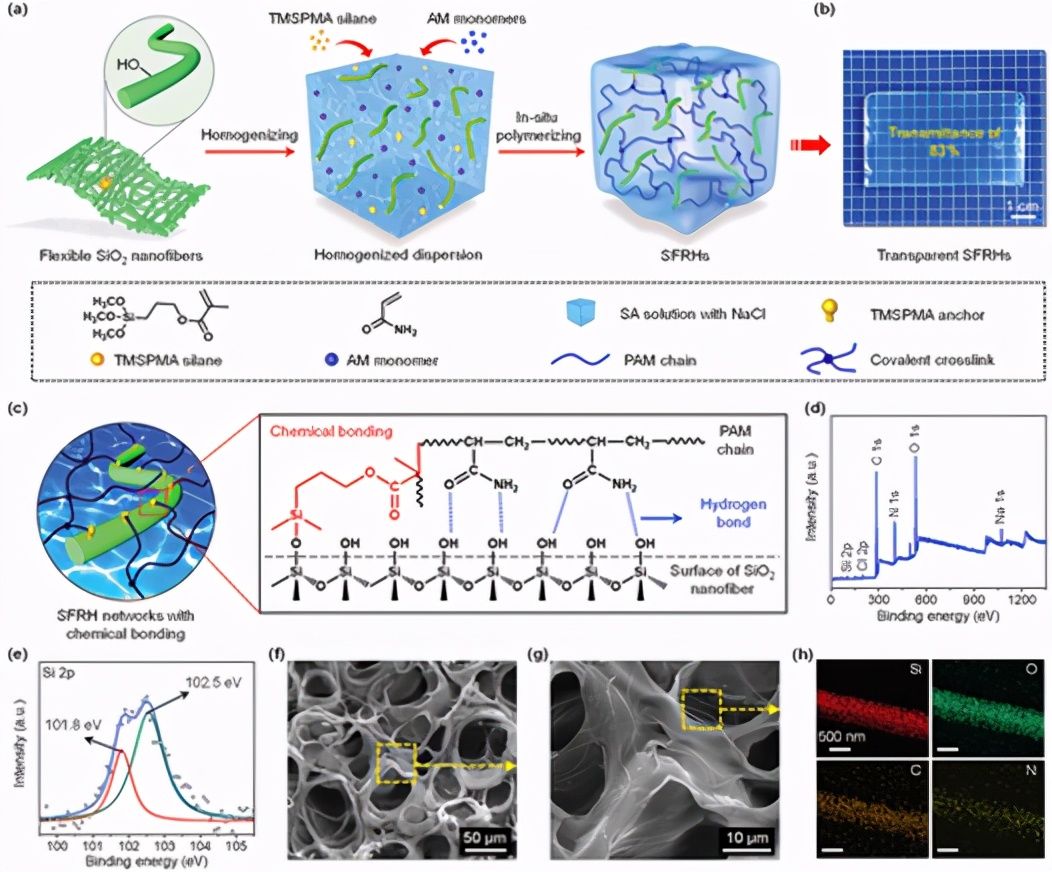
图1 a)示意图,显示了SFRH的制备。b)表现出SFRH(3毫米厚)透明性的光学图像。c)描绘SFRH网络以及二氧化硅纳米纤维和PAM链之间的界面物理和化学键。d)SFRH的XPS调查频谱。e)SFRH用于Si 2p的高分辨率XPS光谱。f,g)SFRH在不同放大倍率下的微观结构。h)SFRH中单个纳米纤维的FESEM-EDS元素图显示了相同区域中Si,O,C和N的分布。
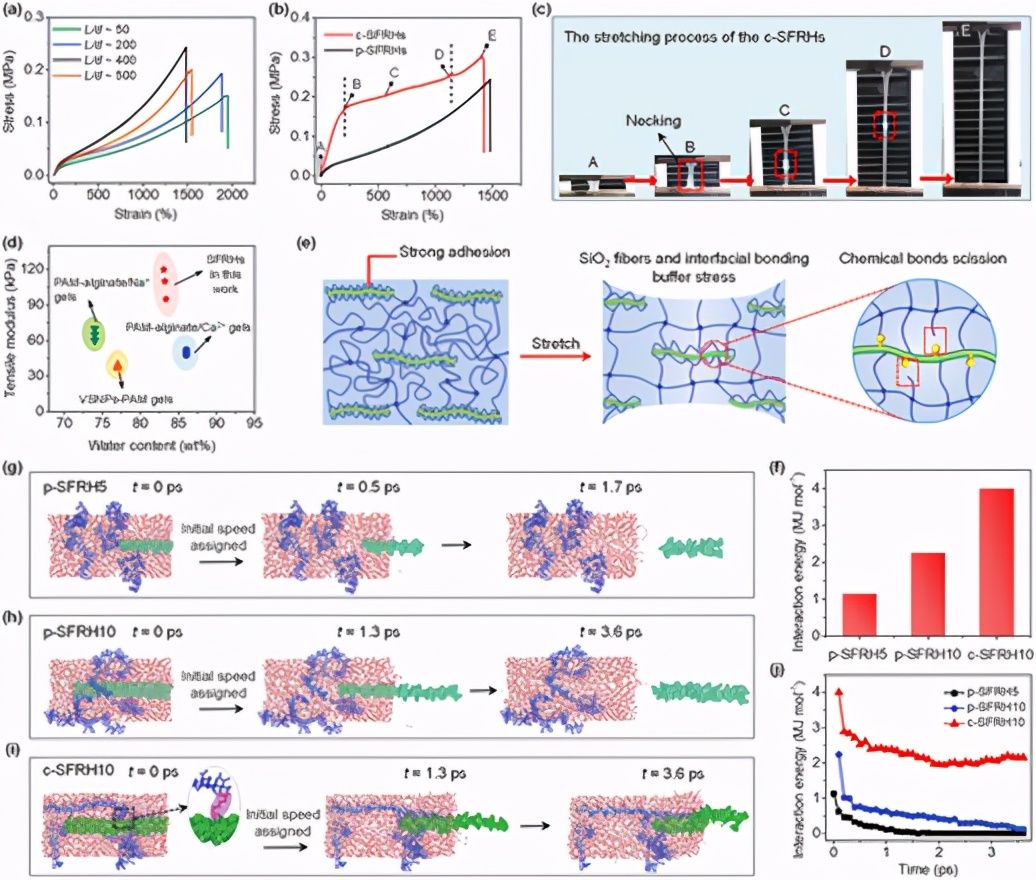
图2 a)具有不同L/d比的p-SFRH的σ-ε曲线。b)p-SFRH和c-SFRH的σ–ε曲线,其中在两种不同的水凝胶中,纳米纤维的L/d比固定为约400。c)图片展示了c-SFRH的拉伸过程。d)SFRH和其他开拓性水凝胶的拉伸弹性模量随水分含量的变化而变化。e)示意图,显示了c-SFRH的拉伸过程。f)p-SFRH5,p-SFRH10和c-SFRH10的相互作用能。g,h)从水凝胶基质中提取出L/d比率为5和10的两种不同的二氧化硅纳米纤维的模拟快照。i)从水凝胶基质中拉出具有界面化学键合的二氧化硅纳米纤维(L/d比为10)的模拟快照。在这三个模型中,水分子的颜色为红色,PAM链的颜色为蓝色,二氧化硅纳米纤维的颜色为绿色。j)从水凝胶基质中抽出二氧化硅纳米纤维的相互作用能与时间的关系。
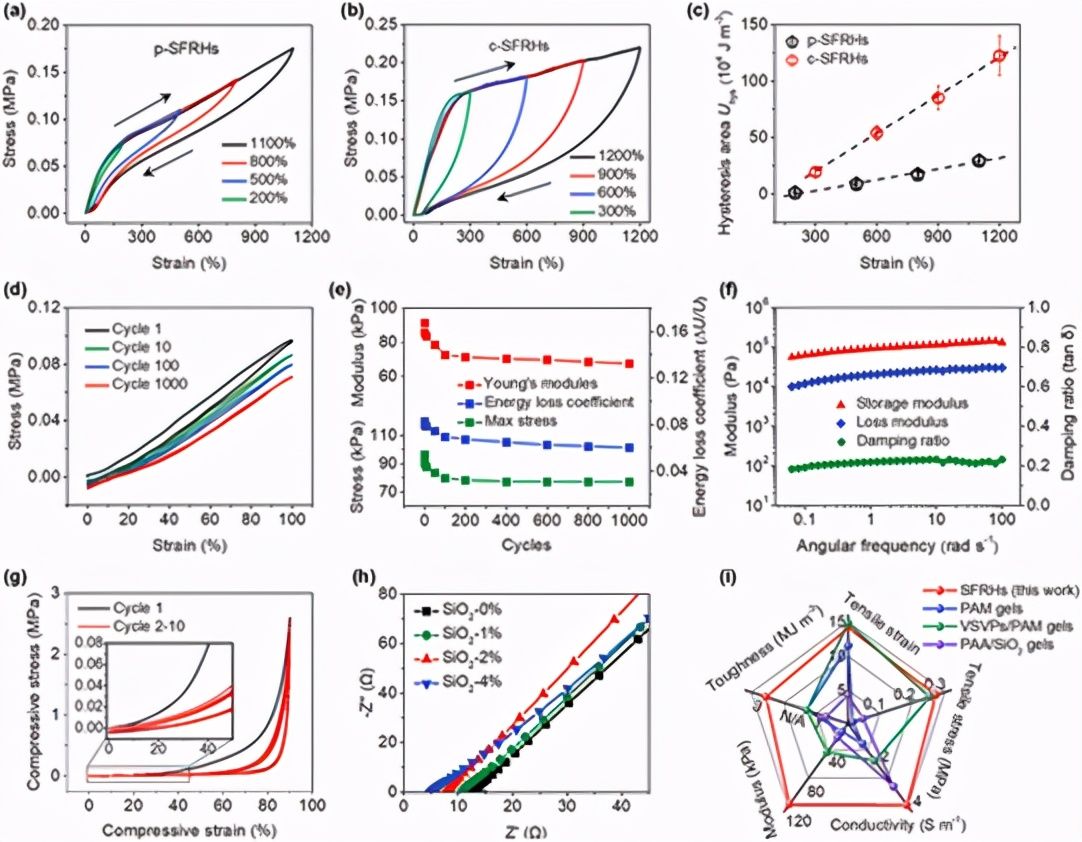
图3 a)p-SFRHs和b)c-SFRHs随拉伸ε的增加,其循环拉伸σ-ε曲线。c)循环拉伸试验中磁滞面积的变化。d)ε为100%的多周期拉伸试验。e)杨氏模量,最大应力和能量损耗系数与拉伸循环的关系。f)20°C下SFRH的储能模量,损耗模量和阻尼比与角频率的关系。g)SFRH的循环压缩σ–ε曲线。h)具有不同二氧化硅纳米纤维含量的SFRH的EIS奈奎斯特图。i)SFRH和其他先前报道的离子导电水凝胶的拉伸应力,应变,韧性,模量和电导率的比较。
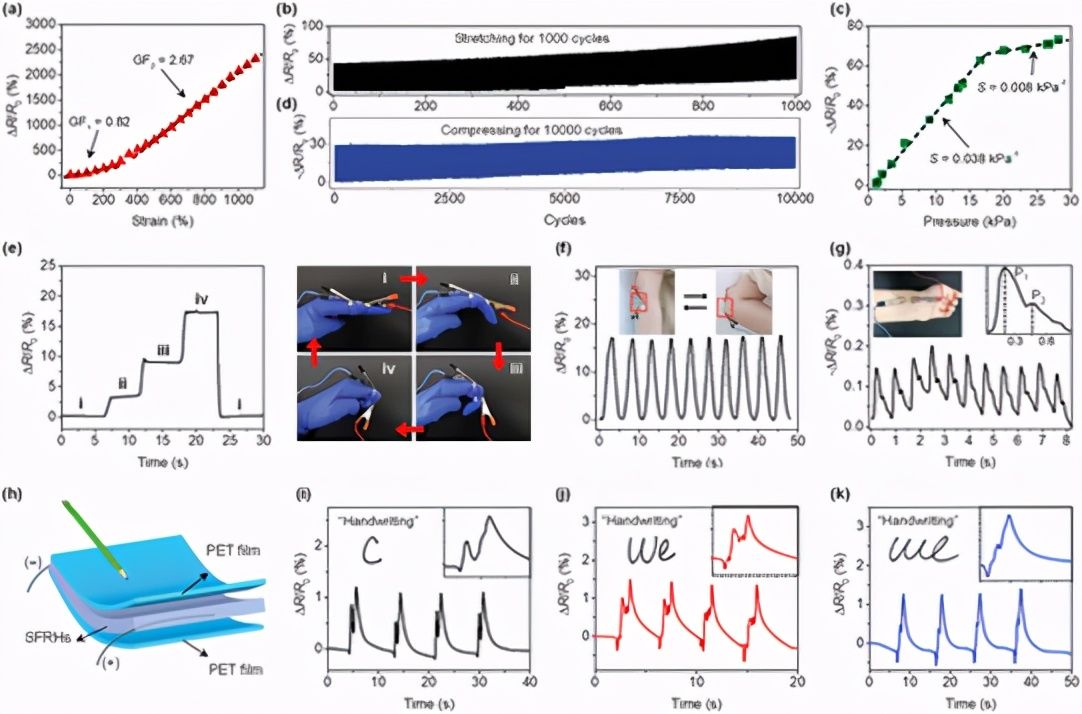
图4 a)基于SFRHs的传感器的相对电阻变化与应变的关系。b)基于SFRHs的传感器在100%拉伸应变下进行1000次循环的循环稳定性测试。c)压力变化时传感器的相对电阻变化和压力灵敏度。d)在6.37 kPa压力下传感器的循环稳定性测试次。基于SFRHs的传感器的相对电阻变化响应于e)各种角度的手指弯曲,f)肘部的反复弯曲/伸直运动和g)人脉。h)签名感测的示意图。相对抵抗力由不同的志愿者写成i)字母“ C”和j,k)“We”。
【总结】
该团队通过原位合成策略制备了具有生物力学特性的化学合成纳米纤维增强水凝胶,该水凝胶具有强大的机械和电子性能。在良好分散的二氧化硅纳米纤维和乙烯基硅烷的存在下,由AM单体合成软水凝胶基质,从而获得具有创新界面化学键的均质SFRH。得益于柔性电纺二氧化硅纳米纤维和牢固的界面结合,所得的透明SFRH在1400%应变下表现出0.3 MPa的高机械强度,与人体皮肤相似的0.11 MPa的杨氏模量,2.98 MJ m-3的高韧性和超弹性。此外,由于相互连接的二氧化硅纳米纤维带有带负电荷的表面羟基,SFRHs显示出高的离子电导率(3.93 S m-1),并且可以检测到广泛的应变(0.5–1100%)和压力(1–28 kPa)。具有强大的灵敏度(GF为2.67)和超耐用性(次循环),这使其成为用于检测各种身体运动,人体脉搏和笔迹的有希望的软传感器。